
Les véhicules autonomes pourront bientôt «voir»les obstacles cachés
Détecter les obstacles même invisibles. Un nouveau système laser va permettre aux véhicules de «voir» les obstacles cachés derrière un tournant ou un autre véhicule. Une équipe de chercheurs de l'Université de Stanford (États-Unis) a en effet mis au point un système laser capable de repérer des obstacles cachés derrière une cloison – une étape nouvelle dans le développement des véhicules autonomes, expliquent-ils. «Il y a cette idée préconçue selon laquelle on ne peut anticiper que les obstacles filmés par les caméras des véhicules. Or nous avons trouvé un moyen de contourner cette situation», déclare Matthew O'Toole, co-auteur de l’étude à l’occasion de la publication de ses travaux dans la revue Nature.
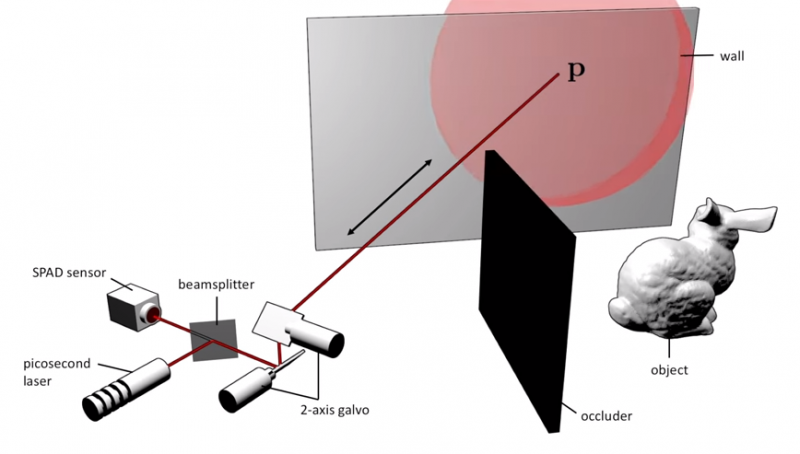
Rebonds de la lumière. L'approche se fonde sur des technologies telles que Lidar, un outil utilisé dans la cartographie des véhicules autonomes qui consiste à envoyer des impulsions laser vers une surface, puis à mesurer le temps nécessaire pour que soit la lumière réfléchie. Ces données sont ensuite utilisées pour construire un modèle en trois dimensions de la surface. Jusqu’ici, rien de nouveau par rapport aux technologies déjà déployées pour les véhicules autonomes mais l’équipe de chercheurs, au lieu de se focaliser sur le rebond initial de la lumière sur les objets, s’est intéressée aux rebonds ultérieurs de la lumière, qui peuvent ainsi frapper d’autres objets. «Nous recherchons les deuxième, troisième et quatrième rebonds, qui peuvent dévoiler des objets cachés», précise Matthew O'Toole. L’ensemble des signaux reçus est ensuite retraité, de manière à éliminer la lumière du premier rebond pour se concentre sur les suivants. Un algorithme permet alors de reconstituer la forme des éventuels objets cachés. En laboratoire, le système a ainsi réussi à révéler avec détail un panneau de signalisation «Exit» ou un mannequin caché par une cloison. Reste à appliquer cette solution dans un environnement en mouvement, avec des conditions d’éclairage changeante et des « objets » qui ne seront pas forcément réfléchissants comme des animaux ou des passants, le tout avec un temps de latence extrêmement court. Pour l’instant, il faut entre une minute à plusieurs heures pour reconstituer une image, un délai totalement impensable pour une voiture autonome.
Grégoire Hamon